

การหาตำแหน่งแบบสามเหลี่ยมในมาตรวิทยา
หลักการที่พิสูจน์แล้วและมีอนาคต
ความแม่นยำและผลลัพธ์ที่เชื่อถือได้เป็นสิ่งสำคัญสูงสุดในงานมาตรวิทยา นี่คือวิธีเดียวที่จะรับประกันได้ว่า ชิ้นส่วนต่าง ๆ จะเป็นไปตามมาตรฐานด้านคุณภาพและความปลอดภัย การหาตำแหน่งแบบสามเหลี่ยม หรือการวัดระยะทางโดยการคำนวณมุมจากพื้นฐานของรูปสามเหลี่ยม เป็นวิธีการวัดที่สามารถใช้บันทึกพื้นผิวของวัตถุได้ ในหน้านี้ คุณจะได้เรียนรู้ว่าการหาตำแหน่งแบบสามเหลี่ยมถูกนำมาใช้ในงานมาตรวิทยาอย่างไร รวมถึงการฉายแสงแบบมีโครงสร้างและวิธีการตัดแสงคืออะไรบ้าง
อธิบายวิธีการหาตำแหน่งแบบสามเหลี่ยม (Triangulation) อย่างย่อ
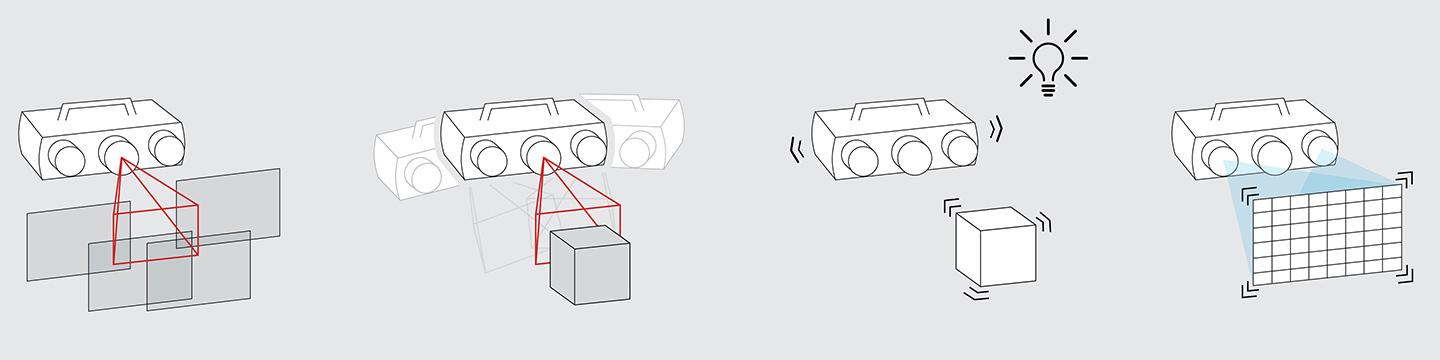
ในทางมาตรวิทยา วิธีการการหาตำแหน่งแบบสามเหลี่ยมถูกนำมาใช้ในการวัดวัตถุโดยอาศัยจุดเลเซอร์และเส้นเลเซอร์แบบรายจุด หรือในบางกรณี เช่น ภาพด้านบน ใช้รูปแบบของลำแสงทั้งหมดในการวัด กล้องหนึ่งตัวหรือมากกว่าที่มีเซนเซอร์จะบันทึกมุมที่แสงสะท้อนจากวัตถุ หรือรูปแบบแสงที่เปลี่ยนแปลงบนพื้นผิว รวมถึงความสว่างและระยะทาง ด้วยวิธีนี้ การฉายแสงและการวัดมุมจะสร้างภาพรวมที่สมบูรณ์ของพื้นผิวของวัตถุที่ทำการวัด
การหาตำแหน่งแบบสามเหลี่ยมถูกนำมาใช้แล้วในยุโรปและอเมริกาในศตวรรษที่ 17 แต่ใช้ในงานสำรวจพื้นที่บนบก หลักการนี้มีต้นกำเนิดมาจากที่นั่นเอง เมื่อต้องการสำรวจพื้นที่ด้วยวิธีการหาตำแหน่งแบบสามเหลี่ยม พื้นที่จะถูกแบ่งออกเป็นรูปสามเหลี่ยมเพื่อใช้ในการวัดระยะทาง สำหรับการหาตำแหน่งแบบสามเหลี่ยม เพียงแค่ทราบขนาดของมุมและความยาวของฐานก็สามารถคำนวณความยาวที่เหลือได้อย่างง่ายดายโดยใช้หลักตรีโกณมิติ
ทุกวันนี้ หลักการหาตำแหน่งแบบสามเหลี่ยมถูกนำไปใช้มากกว่าการสำรวจที่ดิน เช่น ใน Photogrammetry หรือการสแกนแบบ 3D ในด้านมาตรวิทยา กระบวนการการหาตำแหน่งแบบสามเหลี่ยมมักถูกนำมาใช้หลัก ๆ เพื่อการตรวจสอบชิ้นส่วนทางวิศวกรรมหรือการผลิต มีวิธีการหาตำแหน่งแบบสามเหลี่ยมอยู่สองรูปแบบที่ใช้สำหรับวัตถุประสงค์นี้
- การฉายแสงที่มีโครงสร้าง (การฉายลายเส้น)
- การหาตำแหน่งแบบสามเหลี่ยมด้วยเลเซอร์ (การหาตำแหน่งแบบสามเหลี่ยมโดยใช้วิธีการตัดขวางแสง)
การหาตำแหน่งแบบสามเหลี่ยมด้วยเลเซอร์ใช้จุดเลเซอร์หรือเส้นเลเซอร์เพียงจุดเดียวที่สะท้อนจากวัตถุที่วัด และจากนั้นจะถูกตรวจจับโดยเซนเซอร์ ในหลักการของการฉายแสงที่มีโครงสร้าง จะมีการฉายลวดลายแสงขนาดใหญ่ลงบนวัตถุที่ต้องการวัด กล้องหนึ่งตัวหรือหลายตัวที่มีเซนเซอร์จะจับรูปทรงของลวดลายแสงที่ถูกบิดเบือนบนพื้นผิวของวัตถุ ทั้งสองวิธีมักถูกใช้ในมาตรวิทยา ขึ้นอยู่กับงานวัดที่ต้องการ โดยที่หลักการหนึ่งอาจเหมาะสมกว่าอีกวิธีหนึ่ง เจาะลึกลงไปในการหาตำแหน่งแบบสามเหลี่ยมแบบ 3D ด้วยการฉายเลเซอร์และการฉายลายเส้นและค้นหาวิธีการที่เหมาะสมสำหรับโครงการของคุณ
การฉายแสงที่มีโครงสร้างทำงานอย่างไร?
ในการหาตำแหน่งแบบสามเหลี่ยมด้วยการฉายลายเส้น ลวดลายแสงที่แตกต่างกันในรูปแบบของเส้นขอบหรือจุดจะถูกฉายลงบนวัตถุทดสอบทีละลำดับ เพื่อแผนที่รูปร่างที่แม่นยำของวัตถุในรูปแบบ 3D ในการทำเช่นนี้ โปรเจคเตอร์และกล้องอย่างน้อยหนึ่งตัวที่มีเซนเซอร์ (แต่โดยปกติแล้วจะใช้สองตัว) จะถูกชี้ไปที่พื้นผิวที่แบน กล้องรู้ระยะห่างระหว่างตัวเองกับพื้นผิว รวมถึงมุมที่ลวดลายแสงฉายไปยังวัตถุ เพื่อเริ่มการวัดด้วยการฉายแสงแบบมีโครงสร้าง วัตถุทดสอบจะถูกวางไว้บนพื้นผิว แสงที่มีลวดลายจะถูกฉายลงบนวัตถุ และจะมีการเปลี่ยนรูปตามรูปร่างของพื้นผิว ลวดลายจุดหรือเส้นที่ถูกบิดเบือนเหล่านี้จะถูกตรวจจับโดยกล้อง ซึ่งให้ข้อมูลที่จำเป็นในการคำนวณระยะห่างจากแต่ละจุดบนพื้นผิวในพื้นที่มุมมอง ผลลัพธ์ที่ได้คือสิ่งที่เรียกว่า "พอยต์คลาวด์ " หรือ "STL เมช" ซึ่งเป็นภาพที่แม่นยำของวัตถุที่วัด โดยประกอบด้วยจุดวัดขนาดเล็กจำนวนมาก
แสงที่ใช้ในการสแกนด้วยการฉายลายเส้นสามารถเป็นแสงสีฟ้าหรือแสงขาวก็ได้ โดยส่วนใหญ่แล้ว จะใช้แสงสีน้ำเงินเพื่อลดการกระจายของแสงและผลกระทบจากแสงรอบข้างต่อการวัด พื้นผิวที่วางวัตถุเป้าหมายมักจะเป็นสีดำเพื่อหลีกเลี่ยงการสะท้อนแสง


วิธีการที่การฉายลายเส้นสามารถใช้ทำอะไรได้บ้าง?
เนื่องจากความเร็วในการสแกนที่สูง โดยเฉพาะเมื่อสามารถเก็บข้อมูลการวัดหลายจุดพร้อมกันได้ การฉายแสงแบบมีโครงสร้างจึงเหมาะอย่างยิ่งสำหรับงานตรวจสอบในอุตสาหกรรม เช่น:
- การควบคุมรูปทรง ตำแหน่ง และเส้นขอบ
- การเปรียบเทียบพื้นที่ การเปรียบเทียบเป้าหมาย/จริง
- ความสมบูรณ์
- ตำแหน่งของชิ้นส่วนในชุดประกอบ
- การกำหนดตำแหน่งการตัด
หลักการของการฉายแสงแบบมีโครงสร้างยังถูกนำมาใช้บ่อยในงานนิติวิทยาศาสตร์ เพราะมันเหมาะสมกับการวัดวัตถุที่มีขนาดเล็กที่สุดได้ การฉายลายเส้นค่อนข้างไม่เหมาะสำหรับการวัดวัตถุที่โปร่งใสหรือสะท้อนแสงอย่างมาก
ข้อดีและข้อเสียของการฉายแสงแบบมีโครงสร้าง
ข้อดีของการฉายแสงแบบมีโครงสร้าง:
- ข้อมูล 3D แบบพื้นที่ที่มีความละเอียดคงที่
- ความหนาแน่นในการวัดสูง
- ความเร็วในการวัดสูง
- ชุดการวัดที่มีความยืดหยุ่นและสามารถพกพาได้
ข้อเสียของการฉายแสงแบบมีโครงสร้าง
- ความต้องการที่สูงขึ้นต่อเทคโนโลยีการฉายภาพ
- พื้นผิวที่โปร่งแสงหรือสะท้อนแสงอาจต้องมีการเตรียมพื้นผิวล่วงหน้า
- แสงสว่างโดยรอบสามารถส่งผลต่อการวัดได้
- พื้นผิวขรุขระทำให้การวัดระยะด้วยจุดเลเซอร์ทำได้ยาก (แต่เส้นเลเซอร์ไม่ได้รับผลกระทบ)
การหาตำแหน่งแบบสามเหลี่ยมทำงานในการฉายแสงแบบมีโครงสร้างอย่างไร?


การตั้งค่าสำหรับการวัดด้วยการฉายแสงแบบมีโครงสร้าง ซึ่งอิงตามหลักการการหาตำแหน่งแบบสามเหลี่ยมเช่นกัน มีลักษณะคล้ายกับการฉายแสงแบบมีโครงสร้าง วัตถุที่วัดจะถูกวางบนพื้นผิวเรียบ โดยปกติจะใช้โต๊ะหมุน และโปรเจคเตอร์กับกล้องหรือเซนเซอร์จะถูกวางอยู่เหนือพื้นผิว ทั้งสามจุดนี้ก่อให้เกิดสามเหลี่ยมสำหรับการหาตำแหน่งแบบสามเหลี่ยมซึ่งสามารถนำมาใช้ในการคำนวณได้ อย่างไรก็ตาม เมื่อเทียบกับการฉายลายเส้น ซึ่งมีการฉายลวดลายของแถบหรือจุดลงบนเป้าหมาย การหาตำแหน่งแบบสามเหลี่ยมด้วยเลเซอร์จะใช้เพียงจุดเลเซอร์หรือเส้นเลเซอร์เพียงเส้นเดียวเท่านั้น ปัจจัยสำคัญในที่นี้ไม่ใช่การบิดเบือนโดยตรงของแสงบนพื้นผิว แต่เป็นการสะท้อนของแสงต่างหาก พื้นผิวของวัตถุที่ถูกวัดจะสะท้อนเส้นเลเซอร์หรือจุดเลเซอร์ที่ฉายไปยังทิศทางของกล้อง กล้องจะตรวจจับแสงสะท้อนและคำนวณระยะห่างจากแต่ละจุดในมุมมองภาพโดยอิงจากมุมของการสะท้อน
เนื่องจากเส้นเลเซอร์หรือจุดเลเซอร์สามารถจับข้อมูลได้เพียงบางส่วนของวัตถุเท่านั้น ไม่สามารถจับพื้นผิวทั้งหมดได้ในการสแกนครั้งเดียวเหมือนกับการฉายแสงแบบมีโครงสร้าง จึงจำเป็นต้องมีการเคลื่อนย้ายวัตถุที่วัดหรือเซนเซอร์ ดังนั้น การติดตั้งระบบวัดที่มั่นคงจึงเป็นสิ่งจำเป็นสำหรับการหาตำแหน่งแบบสามเหลี่ยมด้วยวิธีเส้นแสง เพื่อให้มั่นใจในความแม่นยำของการวัดในระดับสูง
เลเซอร์การหาตำแหน่งแบบสามเหลี่ยมสามารถใช้ทำอะไรได้บ้าง?
ด้วยหลักการวัดเลเซอร์การหาตำแหน่งแบบสามเหลี่ยมที่แม่นยำมากสามารถทำได้ในช่วงไมโครมิเตอร์ที่เล็กที่สุด แต่ระยะทางที่มากขึ้นก็ไม่มีปัญหากับวิธีการการฉายแสงแบบมีโครงสร้างของการหาตำแหน่งแบบสามเหลี่ยม ดังนั้น วิธีการหาตำแหน่งแบบสามเหลี่ยมนี้จึงเป็นวิธีการวัดที่ได้รับความนิยมในกระบวนการผลิตทางอุตสาหกรรม สามารถใช้สำหรับการควบคุมคุณภาพ การวัดโปรไฟล์และเส้นเค้าโครง ตลอดจนการตรวจสอบความหนาของวัสดุ การสั่นสะเทือน และระยะทาง ด้วยการหาตำแหน่งแบบสามเหลี่ยมด้วยแสงเลเซอร์ สามารถตรวจพบวัตถุที่มีข้อบกพร่องได้ตั้งแต่เนิ่น ๆ และนำออกจากกระบวนการผลิตเพื่อทำการซ่อมหรือรีไซเคิล สำหรับโลหะที่มีความเงา การวัดด้วยการหาตำแหน่งแบบสามเหลี่ยมด้วยแสงเลเซอร์มักให้ผลดีกว่าการฉายลายเส้น การสะท้อนอาจให้สัญญาณที่ผิดพลาดในหลักการวัดด้วยลายแสงในขณะที่วิธีการด้วยเลเซอร์ทำงานโดยใช้การสะท้อนนี้โดยตรง พื้นผิวที่มีความเงามากเกินไปยังสามารถทำให้เกิดปัญหาในการวัดด้วยการหาตำแหน่งแบบสามเหลี่ยมได้ หลักการของการหาตำแหน่งแบบสามเหลี่ยมด้วยแสงเลเซอร์ยังถูกนำมาใช้บ่อยในอุตสาหกรรมบรรจุภัณฑ์และไม้ โลจิสติกส์ เทคโนโลยีทางการแพทย์ และการผลิตอิเล็กทรอนิกส์
การหาตำแหน่งแบบสามเหลี่ยมด้วยแสงเลเซอร์ทำงานร่วมกับแสงเลเซอร์สีน้ำเงินหรือสีแดง แสงสีแดงสามารถทะลุผ่านเป้าหมายได้ ในขณะที่เลเซอร์สีฟ้าสร้างจุดหรือเส้นที่คมชัดบนพื้นผิว นอกจากนี้ เลเซอร์สีฟ้าสามารถให้ผลลัพธ์ที่แม่นยำบนวัตถุที่กำลังเรืองแสงได้ ในขณะที่เซนเซอร์สีแดงอาจถูกรบกวนจากโลหะที่เรืองแสงสีแดงและให้สัญญาณที่ผิดพลาด สำหรับพื้นผิวที่มืด เลเซอร์สีแดงสามารถแสดงข้อได้เปรียบของตัวเองได้ เนื่องจากมีความเข้มของแสงสูงกว่า พื้นผิวที่ขรุขระสามารถวัดได้ด้วยเลเซอร์สีแดงโดยใช้การหาตำแหน่งแบบสามเหลี่ยม ส่วนแสงสีฟ้าจะเหมาะสมกับพื้นผิวที่เรียบ
ข้อดีและข้อเสียของเครื่องสแกนเลเซอร์ 3D
ข้อดีของเครื่องสแกนเลเซอร์:
- ไม่ขึ้นอยู่กับสภาพแสงโดยรอบ
- ความแม่นยำของการวัดสูง
- ความเร็วในการวัดสูง
- สามารถติดตั้งหัวเซนเซอร์บนระบบการวัดที่มีอยู่แล้ว เช่น บนเครื่องวัดพิกัด
- สามารถทำการวัดโลหะเงาได้
ข้อเสียของเครื่องสแกนเลเซอร์:
- ความละเอียดอาจลดลงได้เนื่องจากการเกิดเกรนของเลเซอร์และการเคลื่อนไหว
- ไม่มีความน่าเชื่อถือของกระบวนการ เนื่องจากการวัดขึ้นอยู่กับอุณหภูมิ
- วัตถุที่มีความเงาสูงหรือโปร่งแสงมักวัดได้ยาก
ความแม่นยำสูงสุดด้วยการหาตำแหน่งแบบสามเหลี่ยมร่วมกับเซนเซอร์ ATOS
ด้วยการหาตำแหน่งแบบสามเหลี่ยมด้วยแสงเลเซอร์ของ ATOS คุณสามารถทำการวัดได้อย่างแม่นยำเป็นอย่างยิ่งและได้ผลลัพธ์ที่เชื่อถือได้ กล้องสองตัวและโปรเจคเตอร์ช่วยให้สามารถดำเนินกระบวนการวัดได้ทั้งด้วยวิธีการฉายแสงแบบมีโครงสร้างและวิธีเส้นแสง
เครื่องแปลงวัตถุเป็นข้อมูลดิจิทัล 3D ของ ATOS มีจุดเด่นพิเศษที่น่าสนใจเป็นอย่างยิ่ง: การหาตำแหน่งแบบสามเหลี่ยมด้วยแสงเลเซอร์ด้านขวาและด้านซ้ายสามารถใช้งานแยกกันได้ร่วมกับโปรเจคเตอร์ ซึ่งหมายความว่าสามารถจับภาพมุมมองที่แตกต่างกันสามมุมของวัตถุที่วัดได้ในการสแกนเพียงครั้งเดียว สิ่งนี้สามารถประหยัดเวลาได้มาก เนื่องจากจำนวนการสแกนแยกแต่ละครั้งลดลงอย่างมีนัยสำคัญ แม้ในกรณีของชิ้นส่วนที่มีความซับซ้อน
อีกข้อได้เปรียบของวิธีการสแกนสามจุด (Triple Scan) นี้คือการหาค่ามากเกินไป (Over-determination) การจับภาพชิ้นส่วนด้วยกล้องสองตัวพร้อมกันจะช่วยให้ได้ข้อมูลมากกว่าที่จำเป็นในการสร้างแบบจำลอง 3D ข้อมูลที่มากขึ้นหมายถึงความแม่นยำที่สูงขึ้น ตรวจพบเซนเซอร์และการเคลื่อนไหวเป้าหมายรวมถึงการเปลี่ยนแปลงสภาพแวดล้อมตรวจสอบความถูกต้องของการแปลงและติดตามตำแหน่งเซนเซอร์ 3D แบบสด สิ่งนี้ช่วยให้สามารถทำการวัดได้ด้วยความแม่นยำสูงสุดและเพิ่มความน่าเชื่อถือของกระบวนการ กราฟิกต่อไปนี้แสดงกระบวนการสแกนสามจุด (Triple Scan) พร้อมการหาค่ามากเกินไป (Overdetermination) ผ่านเซนเซอร์ ATOS

ในกระบวนการฉายแสงแบบมีโครงสร้าง การหาตำแหน่งแบบสามเหลี่ยมด้วยแสงเลเซอร์ของ ATOS ทำงานร่วมกับ Blue Light Technology: แสงสีฟ้าแถบแคบจากหน่วยฉายช่วยให้สแกนเนอร์สามารถทำการวัดที่แม่นยำได้ไม่ว่าจะเป็นสภาพแสงโดยรอบและแม้กระทั่งพื้นผิวที่เงา ด้วยการทำงานที่ครอบคลุมของการหาตำแหน่งแบบสามเหลี่ยมด้วยแสงเลเซอร์ ภาพที่แม่นยำของวัตถุจะถูกสร้างขึ้นมา
ในการทำการวัดด้วยการฉายลายเส้น ลายแสงแบบมีโครงสร้างจะถูกฉายลงบนวัตถุที่ต้องการวัด ลายแสงที่มีรหัสจะเปลี่ยนแปลงอย่างรวดเร็วระหว่างการสแกนและแทบไม่สามารถมองเห็นได้ด้วยตาเปล่า นี่คือจุดที่ฟังก์ชันการทำงานของเครื่องสแกนแสงแบบลายเข้ามามีบทบาท การหาตำแหน่งแบบสามเหลี่ยมด้วยแสงเลเซอร์สองตัวจะตรวจจับแถบที่เปลี่ยนแปลงและใช้ข้อมูลเหล่านั้นในการคำนวณพิกัด 3D สำหรับแต่ละพิกเซลของกล้องโดยใช้สมการการแปลงทางแสง จุดวัดหลายล้านจุดที่มีรายละเอียดที่ดีที่สุดจึงได้รับการบันทึกโดยไม่มีการสัมผัสในเวลาเพียงไม่กี่วินาที เซนเซอร์ของซอฟต์แวร์จะสร้างกลุ่มจุดความละเอียดสูงโดยอัตโนมัติ ซึ่งแสดงภาพที่แม่นยำของวัตถุที่วัด
ไม่มีใครเทียบได้: วัดวัตถุที่ซับซ้อนด้วย ATOS และ TRITOP
ด้วยการผสมผสานที่ทรงพลังของเซนเซอร์ ATOS และระบบการวัดทางภาพถ่าย TRITOP การตรวจสอบวัตถุขนาดใหญ่และซับซ้อนก็ไม่เป็นปัญหา TRITOP ถูกใช้ในการวัดจุดอ้างอิงบนชิ้นส่วน ขณะที่ ATOS ใช้จุดอ้างอิงเหล่านั้นในการแปลงการวัดแต่ละจุดโดยอัตโนมัติ ผลลัพธ์ที่ได้คือความแม่นยำที่สูงมากและสามารถหลีกเลี่ยงการวัดที่ซ้ำซ้อนได้อย่างมาก การผสมผสานที่ไม่มีใครเทียบได้นี้มีความสำคัญโดยเฉพาะสำหรับการตรวจสอบชิ้นส่วนแรก การผลิตเครื่องมือ และการผลิตโครงตัวถังรถยนต์เปล่า (body-in-white) คุณก็สามารถใช้การผสมผสานที่ทรงพลังของ ATOS และ TRITOP สำหรับกระบวนการวัดที่ซับซ้อนของคุณได้เช่นกัน



